Grounding for LimbIK, CCD and/or FABRIK solvers. More...
Public Member Functions | |
| override void | ResetPosition () |
| Resets this Grounder so characters can be teleported instananeously. More... | |
 Public Member Functions inherited from Grounder Public Member Functions inherited from Grounder | |
| delegate void | GrounderDelegate () |
| Delegate for Grounder events. More... | |
Public Attributes | |
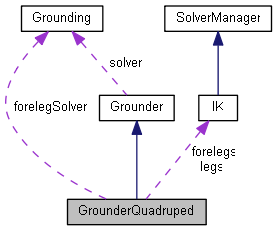
| Grounding | forelegSolver = new Grounding() |
| The Grounding solver for the forelegs. More... | |
| float | rootRotationWeight = 0.5f |
| The weight of rotating the character root to the ground angle (range: 0 - 1). More... | |
| float | minRootRotation = -25f |
| The maximum angle of rotating the quadruped downwards (going downhill, range: -90 - 0). More... | |
| float | maxRootRotation = 45f |
| The maximum angle of rotating the quadruped upwards (going uphill, range: 0 - 90). More... | |
| float | rootRotationSpeed = 5f |
| The speed of interpolating the character root rotation (range: 0 - inf). More... | |
| float | maxLegOffset = 0.5f |
| The maximum IK offset for the legs (range: 0 - inf). More... | |
| float | maxForeLegOffset = 0.5f |
| The maximum IK offset for the forelegs (range: 0 - inf). More... | |
| float | maintainHeadRotationWeight = 0.5f |
| The weight of maintaining the head's rotation as it was before solving the Grounding (range: 0 - 1). More... | |
| Transform | characterRoot |
| The root Transform of the character, with the rigidbody and the collider. More... | |
| Transform | pelvis |
| The pelvis transform. Common ancestor of both legs and the spine. More... | |
| Transform | lastSpineBone |
| The last bone in the spine that is the common parent for both forelegs. More... | |
| Transform | head |
| The head (optional, if you intend to maintain its rotation). More... | |
| IK[] | legs |
| IK componets of the hindlegs. Can be any type of IK components. More... | |
| IK[] | forelegs |
| IK components for the forelegs. Can be any type of IK components. More... | |
| Vector3 | gravity = Vector3.down |
| When using GrounderQuadruped on a spherical object, update this vector to always point towards the center of that object. More... | |
| Public Attributes inherited from Grounder | |
| float | weight = 1f |
| The master weight. Use this to fade in/out the grounding effect. More... | |
| Grounding | solver = new Grounding() |
| The Grounding solver. Not to confuse with IK solvers. More... | |
| GrounderDelegate | OnPreGrounder |
| Called before the Grounder updates its solver. More... | |
| GrounderDelegate | OnPostGrounder |
| Called after the Grounder has updated its solver and before the IK is applied. More... | |
| GrounderDelegate | OnPostIK |
| Called after the IK has updated. More... | |
 1.8.4
1.8.4

